
Mit dem Positioniersysteme Plugins für die CETONI Elements Software haben Sie die volle Kontrolle über Ihre Positioniersysteme. Die einfach zu bedienende und übersichtliche Oberfläche macht das manuelle Positionieren der Systeme zum Kinderspiel. Verfahren Sie die Systeme einfach durch Anklicken einer Position auf dem Bildschirm oder indem Sie einen Container (Well, Tank…) auf der grafischen Darstellung anklicken.
Die aktuelle Position des Positioniersystems, die aktuelle Konfiguration Ihres Arbeitstisches inklusive aller Behälter und Mikrotiterplatten sowie alle anderen wichtigen Parameter werden Ihnen in der übersichtlich gestalteten grafischen Oberfläche angezeigt.
Mit den leistungsfähigen Scriptfunktionen realisieren Sie selbst anspruchsvolle Positionieraufgaben bequem per Drag & Drop. Durch diese grafische Programmierung können Sie Prozesse und Abläufe ohne viel Einarbeitungszeit automatisieren.
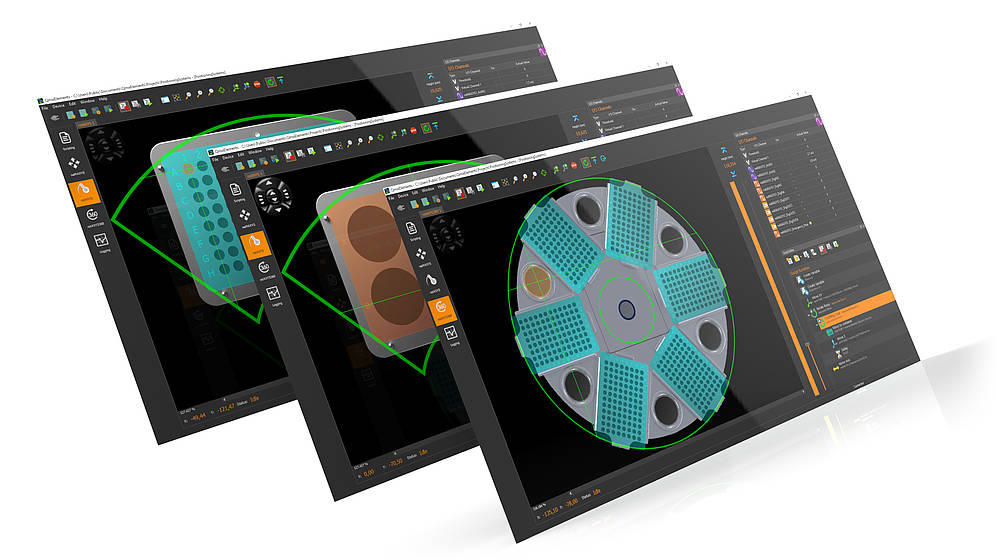
Grafische Oberfläche
Intuitiv und einfach zu bedienen
- Positionierkarte zur bequemen XY-Positionierung per Mausklick – stufenloos zoombar
- einfache Positionierung durch Anklicken von Wells, Tanks oder anderen Behältern
- Z-Panel für die Positionierung der Z-Achse
- Steuerkreuz zur manuellen Steuerung von X, Y und Z-Achse
- Visualisierung aller aktuellen Parameter (Positionen, Status…)
- schnelles Einfügen der aktuellen Position in Positionierscripte mit nur einem Mausklick
- Anzeige aller Probenbehälter (Wellplatte, Wells, Becherglas…) als anklickbare Elemente
- Stufenlose Vergrößerung per Mausrad
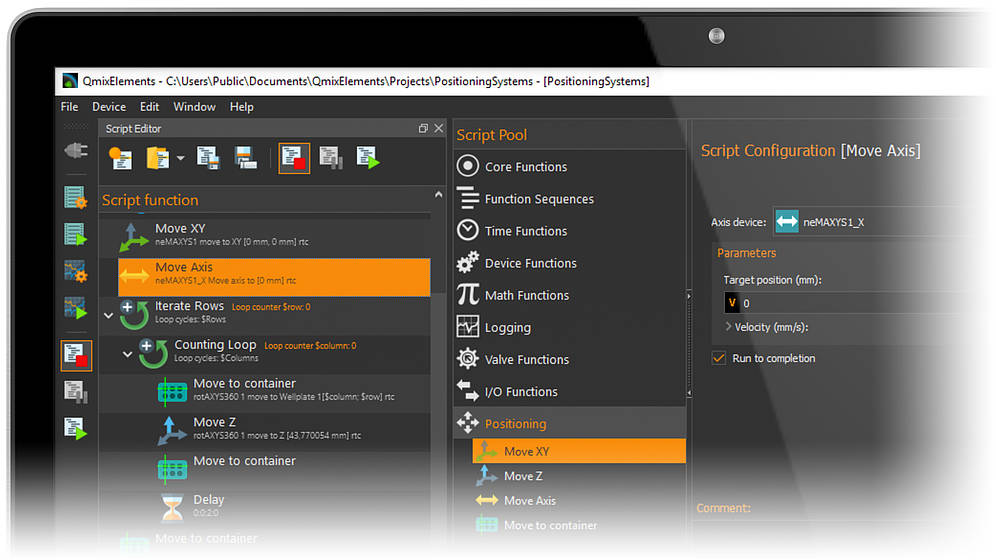
Leistungsfähige Skriptfunktionen
Automatisieren per Drag&Drop
Durch die integrierten Skriptfunktionen wie z.B. Move to XY, Move Z oder Move to Container lassen sich die Positioniersysteme bequem und einfach in das CETONI Elements Scripting System einbinden.
Mit dieser grafischen Scriptprogrammierung erstellen Sie komplexe Positionierscripte schnell und bequem per Drag & Drop. So können Sie z.B. das Abrastern von allen Wells einer Wellplatte mit nur 3 Scriptfunktionen realisieren.

Volle 3D-Maus Unterstützung
Intuitive Ein-Hand-Steuerung
Durch die Unterstützung der 3D Eingabegeräte von 3D Connexion (3D Maus) ist eine intuitive Steuerung aller Achsen der Geräte mit einer Hand möglich. Sie steuern die Systeme damit so präzise und feinfühlig, als ob Sie die einzelnen Achsen der Geräte direkt mit der Hand bewegen würden.